

制御情報工学科には11名の教員が所属しており、各教員毎に11の研究室があります。各研究室は「機械制御工学研究室」「電気電子工学研究室」「情報工学研究室」に区分されます。ここでは各研究室の概要について紹介します。

機械工学・制御工学系研究室を紹介します。

・環状交差点、ラウンドアバウトの通過交通量についての研究
・PID制御における制御特性改善についての研究

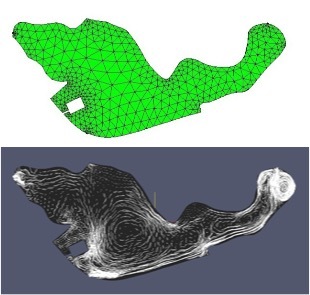
・水質改善に役立てるための池内流れ解析
・静圧軸受システムの流れ解析

電気・電子工学系研究室を紹介します。
・電磁波の放射と透過に関する研究
・複雑な数式に対する高精度な数値計算法の開発
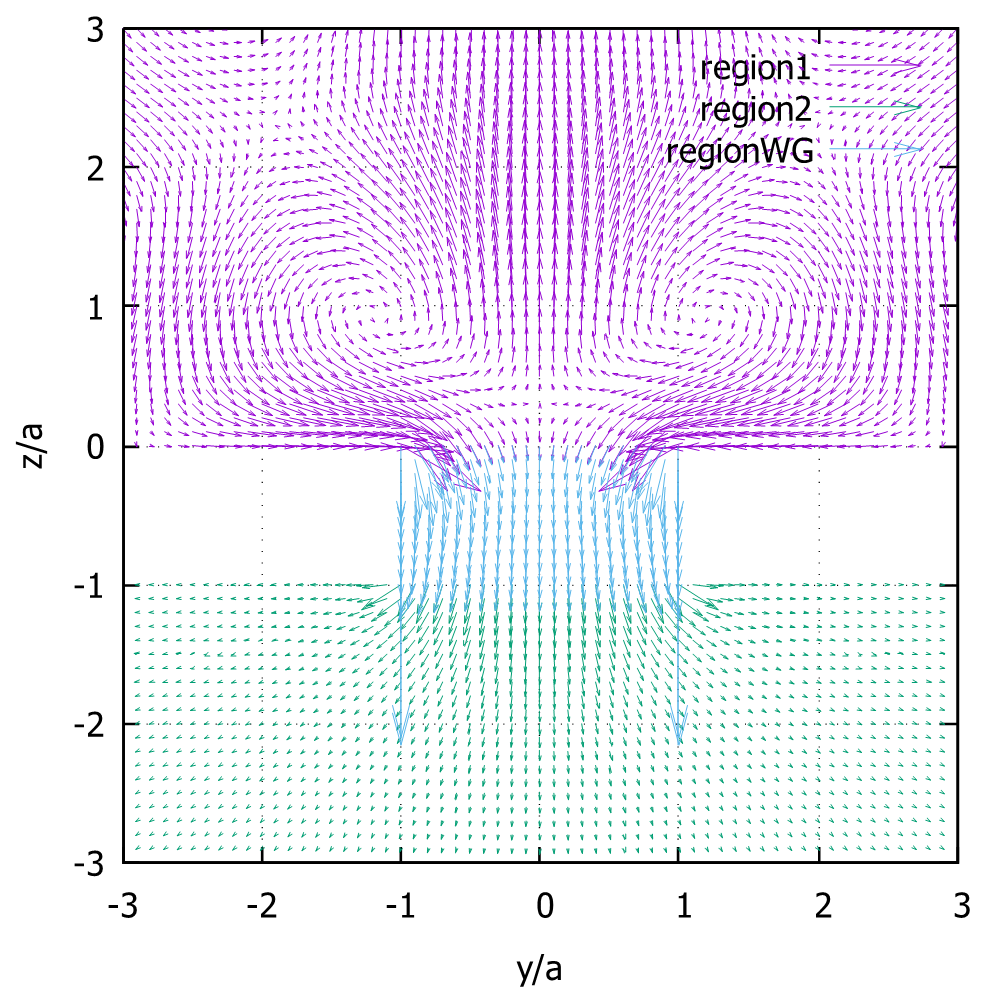
金属板に開けられた四角い穴や金属管でできたアンテナ(導波管アンテナ)からの電磁波の漏れ量や放射量が、どのようなときに多く、また少ないのかを数理的な方法(小林ポテンシャルの方法)で厳密に調べ、その原理を解明する研究です。また、そのために必要となる複雑な計算式を効率よく高精度で計算するためのアルゴリズムを開発することも研究の目的となります。この研究で目に見えない電磁波の様々な特性を正確に把握することができ、他の汎用的近似解法の精度を正しく評価するための基準解が得られます。
図は金属板の四角い穴から電磁波のエネルギーが流れ出ていく様子を可視化した結果です。
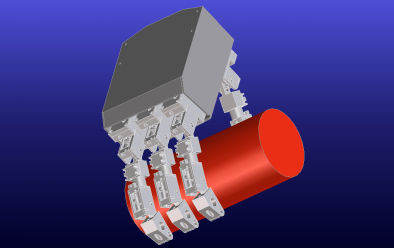
・複屈折共焦点レーザー走査型顕微鏡の開発
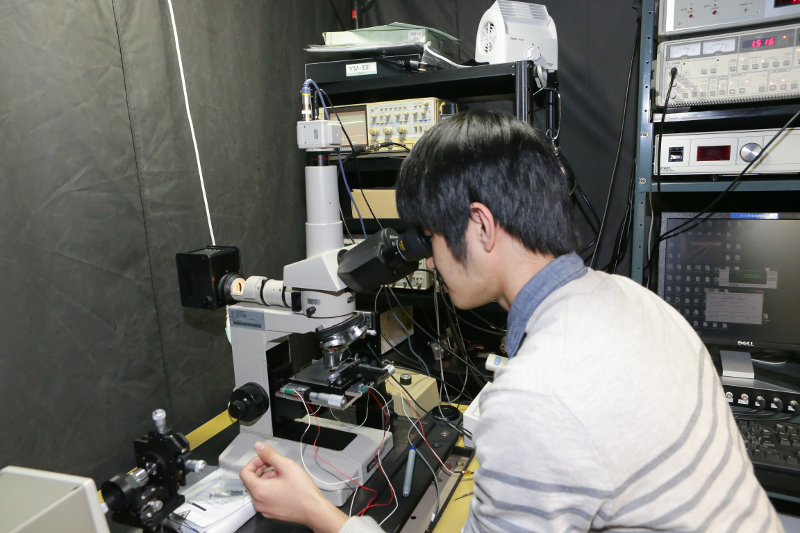
近年の光エレクトロニクスの発展に伴い、画像表示用ディスプレイやBlu-rayディスクプレーヤーなどに代表されるような光学機器の性能が飛躍的に向上しています。これらの更なる性能向上のためには、ガラスや液晶、透明樹脂などのような光学材料の評価が重要となります。光情報工学研究室では、このような光学材料や生体試料などの光学特性を定量的に測定するためのレーザー計測システムや特殊な光学顕微鏡の研究開発を行っています。写真は本研究室で開発している特殊な顕微鏡で、光の波長よりも小さな構造をもつ試料をコンピュータ上で画像化するシステムです。
・小児用磁気浮上式人工心臓の開発(治療機器)
・血液細胞の機械特性評価システムの開発(診断機器)

情報工学系分野の研究室を紹介します。
・発達期における神経ネットワーク形成に関する研究
・大脳感覚領野における神経ネットワークの構造と機能との関係の研究
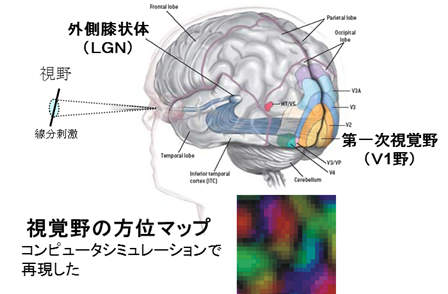
脳・神経系のもつ物体の認識、記憶、判断などの機能は、既存のコンピュータよりも優れています。人工知能の技術は、脳における神経ネットワークが作り出す機能を模倣することで発展してきています。本研究室では、発達期における神経ネットワークの形成をコンピュータシミュレーションで再現しています。写真は、シミュレーションで再現した、視覚領野に見られる方位マップと呼ばれる構造です。また、得られた神経ネットワークに、実際の画像や音声を入力したときのモデル神経細胞の応答を求め、神経ネットワークという「構造」と脳の「機能」との関係について研究しています。

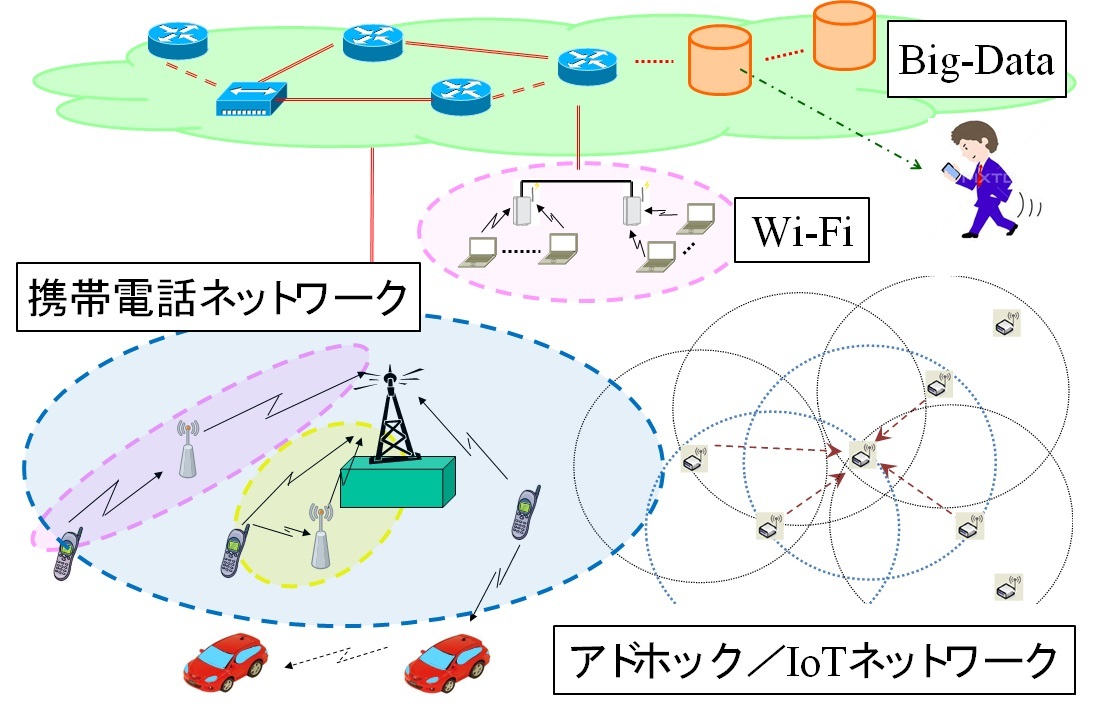
・エネルギー効率に優れたマルチホップ通信の研究
・農作業最適化に向けたIoTセンサネットワークの研究