

制御情報工学科の講義や実験実習の一部の内容を紹介しています。内容や講義名は年度により異なる場合があります。講義科目や講義内容の詳細はシラバスをご覧ください。
情報処理基礎(1年次・鈴木)
講義内容の説明
プコンピュータ基礎演習(1年次・通年)
芹澤教授、大久保准教授
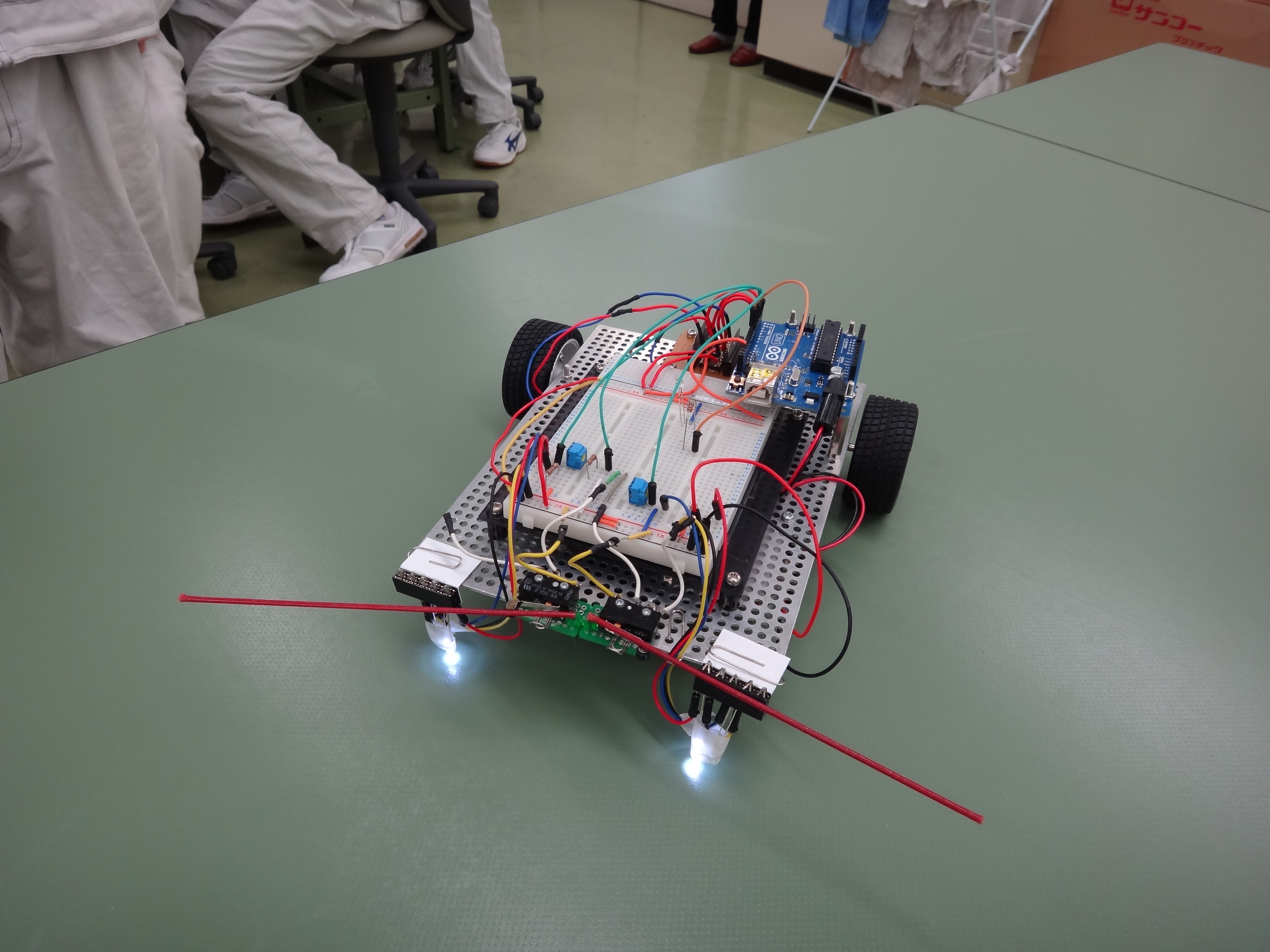
コンピュータは、プログラムを入れ替えることにより様々な目的で利用可能な画期的なマシンです。この科目では、なぜそのような万能なマシンであるコンピュータが誕生したのか、コンピュータの中身はどうなっているのか、コンピュータを使いこなすためにはどうすればよいのかを講義形式の授業と進化するロボット(EVOROBO)を用いた班単位のハードウェアとソフトウェアの実習を通して学習します。最終的には、各班で自由にアイデアを出し合ってマイクロコンピュータを応用した製品を開発します。
プログラミング演習Ⅰ(2年次・前期)
横山講師

私たちの身の回りの電子機器にはマイクロコンピュータが組み込まれており、組み込み系プログラムにより制御されています。プログラミング演習では組み込み系プログラミング言語の代表であるC言語の基礎を学習します。C言語は長い歴史を有し、「C言語さえ習得すれば、どんな言語も難なく習得できる」と言われており、Java、C#、C++など多くの新しい言語の基礎となっています。本演習ではC言語による「文字入出力」「繰り返し処理」「条件判断」「配列への入出力、探索」「ファイル入出力」「関数、構造体」「乱数」などの問題演習を行った後、オリジナルアプリケーション(ゲーム)の制作と発表会を行っています。なお、開発環境にはEmacsen、コンパイラにはgccを用いています。
メカトロニクス演習Ⅰ(2年次・後期)
松本准教授
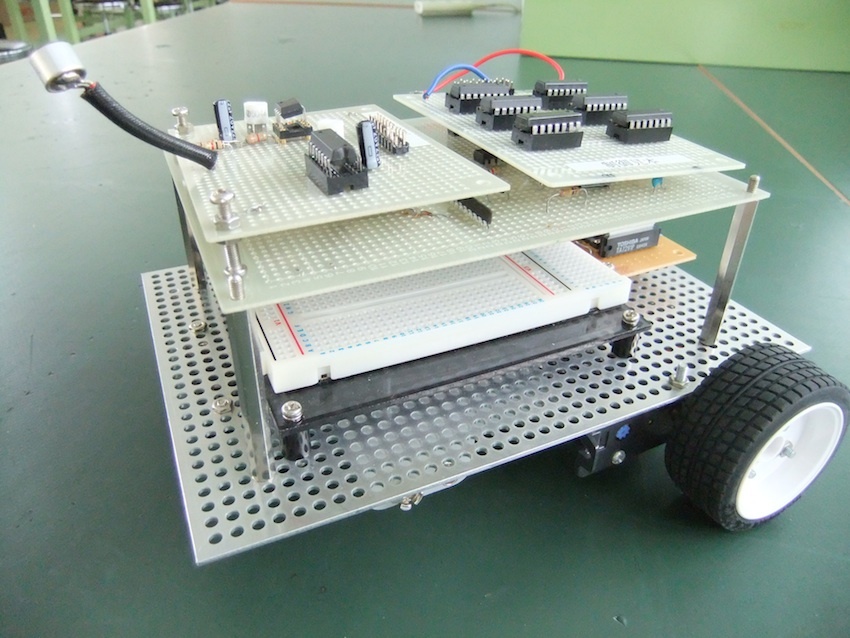
機械(メカニクス)と電気(エレクトロニクス)の融合=メカトロニクス機器を制御するためのデジタル制御技術を実践的に学びます。思い通りに機器を動かすためには、デジタル回路やコンピュータの知識が必要です。本演習では、写真に示すような音に反応して動作するロボットを製作し、ロボットの頭脳にあたる制御部を「 IC」「CPLD」「マイコン」と進化させ、それらの特徴や動作原理を理解します。また、設計書の作成やグループ作業を通じて文章作成能力やチームワークを養います。
プログラミング演習Ⅱ(3年次・後期)
鈴木准教授
コンピュータの内部でキャラクターが作られるように、コンピュータの内部では仮想的なモノを作ることが出来ます。このようにコンピュータの内部で作られた仮想的なモノのことを「オブジェクト」といいます。C言語は広く利用されている言語ですがオブジェクトを扱いやすいようには、なっていません。そこでオブジェクトを簡単に扱えるようにCを拡張した言語C++が開発されました。プログラミング演習IIはプログラミング演習IでのCの経験を前提にC++とオブジェクト指向プログラミングの基礎を学習する教科です。特にオブジェクトの設計図に相当するクラス概念の学習を中心に「コンストラクタ、デストラクタ」、「情報隠蔽」、「オーバーロード」、「参照型」、「関連」、「継承」、「多態性」などを学び、多人数によるコード作成を経験します。開発環境として gcc, gdb, Emacsen, Diaなどを利用しています。
メカトロニクス演習Ⅱ(3年次・前期)
山崎准教授
(メカトロニクス演習室)
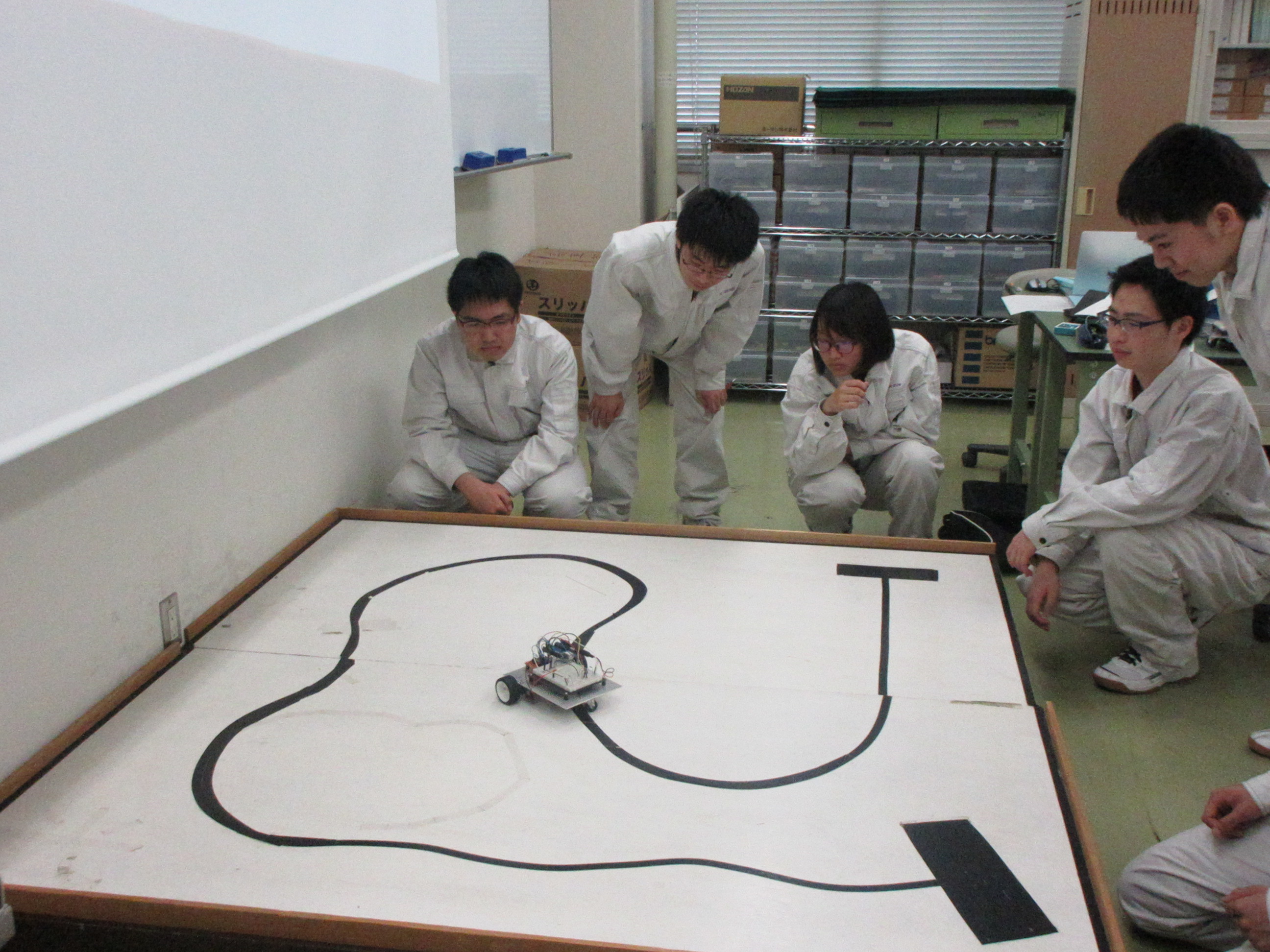
前学年までにメカトロニクスの頭脳部をロジック回路やCPLDで実現し、主にハードウェアにより自走式の移動型ロボットシステムを設計、製作しその動作原理について学習してきました。本演習では、マイクロコンピュータ(マイコン)や各種入出力センサやデバイスを用いて、ソフトウェア(プログラム)により様々な動作が実現できることを学習します。最終目標として、学生自らのアイデアをもとに自律走行マシンを設計・製作し、発表会にてその動作確認を行います。その過程で、システム開発手法の基礎を体得しドキュメント作成やプレゼンテーション能力なども養います。写真は、発表会にて設計・製作したマシンを自律走行させている様子です。
創造設計(4年次・通年)
吉野教授・長谷教授・長縄教授・横山講師
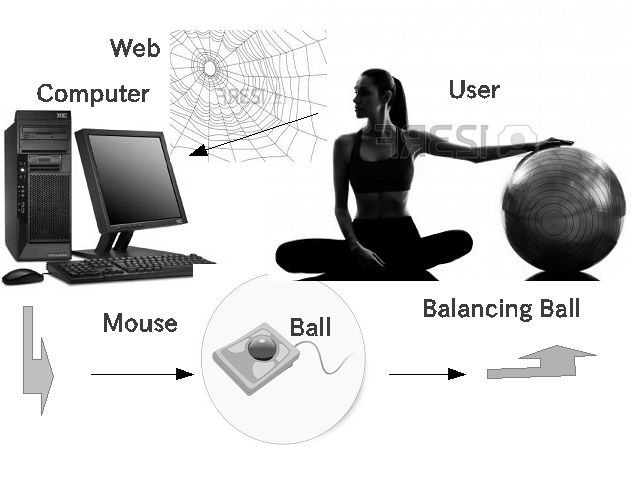
創造設計は、ベンチャー企業(VB:Venture Business)[8名/企業]を起業したという想定で行われる実践的トレーニングです。企画、設計から製作、特許調査に至るまで一連のものづくりを通して、創造力を養成します。与えられるミッションは「コンピュータを使って、世の中にない「何か」を開発せよ!」です。彼らは与えられた制約条件(金、時間、開発環境)の下でこのミッションを遂行していきます。創造設計に組み込まれている「DNA」は「遊び心」(Homo ludens= 遊ぶ人:人間の本質(Huizinga))です。写真は作品の一例です。この時のミッションは「世の中にないスポーツ機器」でした。現代人は「Webの世界」で多くの「時」を過ごす。この世界を動くために必要なのは、簡単なマウス操作のみ。筋肉系はほとんど使わない。これでは、運動器症候群(locomotive syndrome)に落ち込む。だったら、マウスの内部にあるボールを外界に拡大して取り出し、そのボール(Balance Ball)を体全体で操作することでWebの世界をブラウジングできるとしたら・・・というコンセプトから生み出された作品です。こんなユニークな作品が毎年、生み出されています。
コンピュータグラフィックス(4年次・通年)
藤尾教授
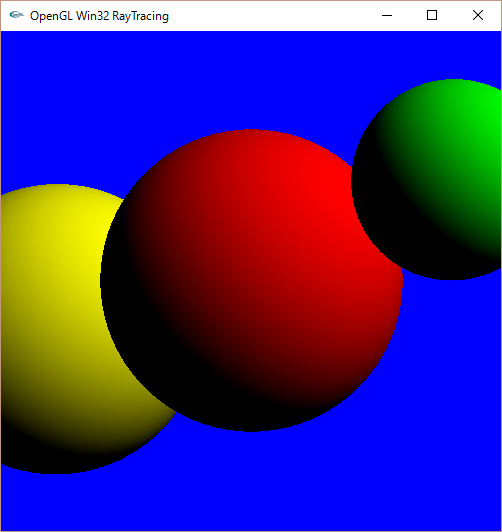
コンピュータグラフィックス(CG)は、映画やCMなどを始め、CAD/CAEなど娯楽や工業など多くの分野で活用されています。本講義では、3次元空間を2次元画面に変換する座標変換から、立体感を出すための色の濃淡の付け方、そしてポリゴンの前後関係による隠面処理など、CGの基礎について学習します。写真は演習課題でプログラミングし、OpenGLを用いて描画した「複数円のレイトレーシング表示」と「ポリゴン(STL)のビューア」で表示したペンギンと富士山の例です。なお、この演習課題の開発言語にはC++、環境にはVisualStudioを用いています。
人工知能(5年次・前期選択)
宮下教授
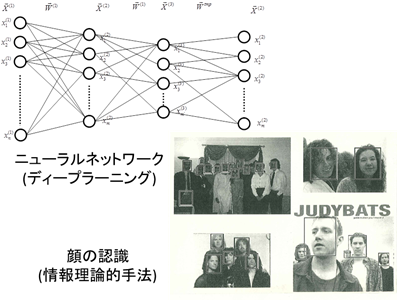
人工知能(AI)の技術は、囲碁や将棋のプロ棋士に勝つことのできるプログラムが開発されて世界でも大きな話題となっています。こうした技術を支えているのが、強化学習やニューラルネットワークの1つであるディープラーニングです。これらの技術は、自動運転をする車などへも応用されてきています。最近のカメラでは、画像の中から人の顔だけを認識することができますが、これも人工知能の技術を応用した例です(図)。それ以外にも、巡回セールスマン問題のような組み合わせ最適化問題を解く手法など、実際に製品に組み込んで実用化してきた人工知能の技術についても学びます。
ロボット工学(5年次・後期選択)
吉野教授

人型ロボットの腕・脚指のように関節がいくつか連なっているものを多関節リンク機構、多関節ロボットといいます。このようなロボットをなめらかに精密に動かすためにはロボットに作用する力やモーメントを調べ、モータをどのように動かしたら良いかを学びます。工場で働くロボットが高速に動くことや2足歩行ロボットが倒れず歩くための基本となります。
工学実験Ⅱ(5年次・前期)
宮下教授・藤尾教授・鈴木准教授・大久保准教授・山崎准教授・松本准教授
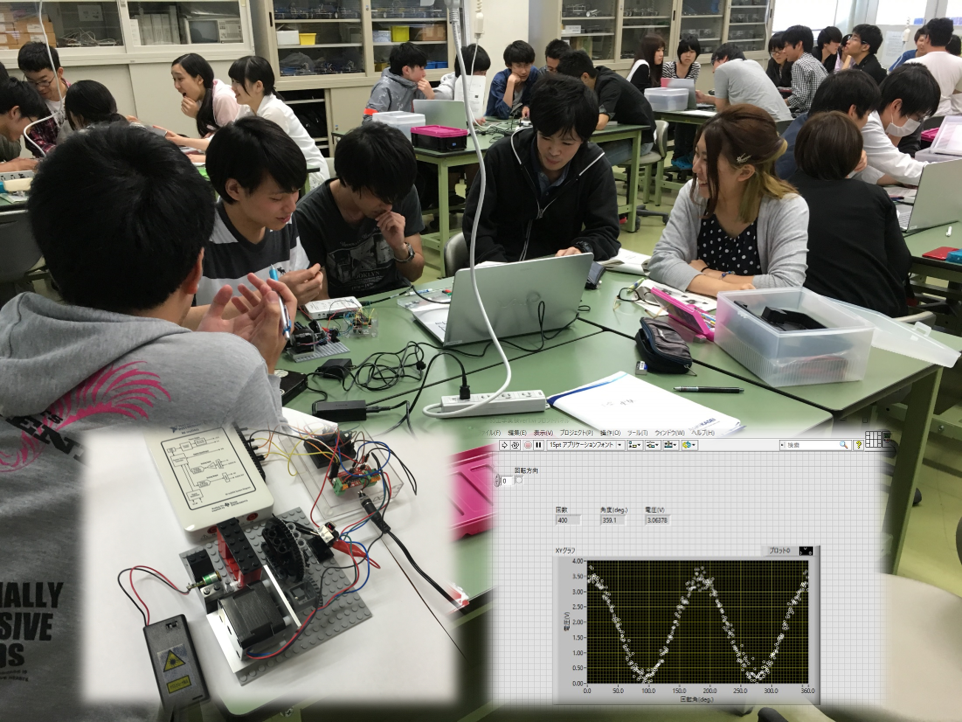
工学実験Ⅱは、(1)認知工実験、(2)デジタルインダストリアル実験、(3)光情報工学実験、(4)数値流体工学実験、(5)組込みシステム実験、(6)情報科学実験から構成されており、各テーマは担当教員の専門性を活かしたものとなっています。これらの実験は、技術者として必要とされているハードウェア・ソフトウェアの両面において実践の場で活用することができるものを意識していて、工学技術上では、制御、情報、機械工学の領域にまたがっています。写真は(3)光情報工学実験における実験風景で、コンピュータ制御を用いた光計測システムの構築をグループで行っている様子です。この実験では、National Instruments社のLabVIEWでソフトウェアを作成し、同社のNI myDaq Deviceでデータ収録などを行っています。
卒業研究(5年次・通年)
S科全教員

卒業研究では、3~5名が各研究室に配属され、研究テーマについて指導教員からマンツーマンで研究指導を受けます。研究テーマは機械制御、電気電子、情報工学まで幅広く、その成果は学会等でも発表されています。研究では10月の中間発表、3月の卒業研究発表会で、口頭発表しプレゼンテーション能力や質疑応答の練習を行います。また、研究成果は各発表会の予稿、卒業論文としてまとめ、報告書作成能力も養います。写真は卒業研究発表会の様子です。S4の学生が、次年度の研究室配属の参考にするため、熱心に聴講しています。
平成27年度の各研究室の主な研究テーマを紹介します。
| 研究室名 | 卒業研究テーマ |
| 機械制御工学系 | |
| ロボット工学研究室 | べベルギヤを用いたロボットアーム用関節トルクセンサの機構とモデル化 |
| 制御工学研究室 | Quadcopterの制御機構に関する研究 |
| 計測制御システム研究室 | 横断歩行者を考慮したラウンドアバウトの交通シミュレーション |
| 数値流体力学研究室 | 温度成層内の渦構造の数値解析 |
| 電気電子工学系研究室 | |
| 電磁波工学研究室 | 厚い導体平板内の方形開口による平面電磁波回折 |
| 光情報工学研究室 | 多機能複屈折測定装置の開発 |
| 生体システム工学研究室 | 小児用人工心臓に用いる磁気軸受の開発 |
| 情報工学系研究室 | |
| 認知工学研究室 | 方位マップの構造と視覚機能の関係のモデル研究:ネコとげっ歯類動物の違い |
| デジタルインダストリ研究室 | 画像処理に基づく患者の動向監視支援システムの開発 |
| 情報科学研究室 | モジュラー論理のモデル論による検討結果について(H26年度テーマです) |
| 通信工学研究室 | 無線アドホックルーティングに伴うエネルギー効率の特性比較 |
