多指ハンドの研究将来望まれる災害救助・支援、また家事や介護を行う各種ロボットの実現にあたり、人間型ハンドの機能の獲得は非常に重要な役割を持つ。これらロボットハンドでは、小型で高出力が得られること、高度なセンシング機能(特に力検出)の2つの要素を実現することが課題となる。 本研究では、指にかかる力を関節に発生するトルクとして検出できる関節トルクセンサに注目し、このセンサ機能を有する関節機構の開発と、その関節機構を内蔵した小型のハンドの実現へ向けた研究を行っている。 関節トルクセンサの原理指の関節構造とトルクセンサの構成をFig.1に示す。この機構はDCモータで平歯車を介してウォームを駆動しホイールに固定した指を駆動する仕組みとなっている。検出原理について説明する。指に外力が加わるとホイールを介しウォームが軸方向に力を受けてスライドし、両端に配置された皿バネにより外力に比例した変位が生じる。 この変位をセンサで検出することにより関節トルクとして検出することが出来る。 この機構の場合,センサが非接触であるため信頼性が高まる、モータとセンサまでの間のバックラッシュが少ないため力制御の応答性の向上が期待できる、といった利点がある。 なお使用するセンサは渦電流式変位センサである。また皿バネを用いることにより皿ばねの枚数や向きを調整してセンサ感度の調整が可能である。  実験モデルによる機能試験実際に本研究で考案した関節機構を内蔵する3軸の多関節指モデルの設計・製作を行った。モデルの構成と外寸はFig.2に示すとおりである。 このモデルは2軸がPitch軸、1軸がYaw軸として可動する。 この3軸それぞれに関節トルクセンサを内蔵しており、それによって指にかかる全方向の力を検出可能としている。  このモデルを使用して、各関節にインピーダンス制御を適用した力制御、指先の合成インピーダンス制御が可能であることを確認した。 今後は更に詳細な機能解析とモデルの小型化を行う予定である。 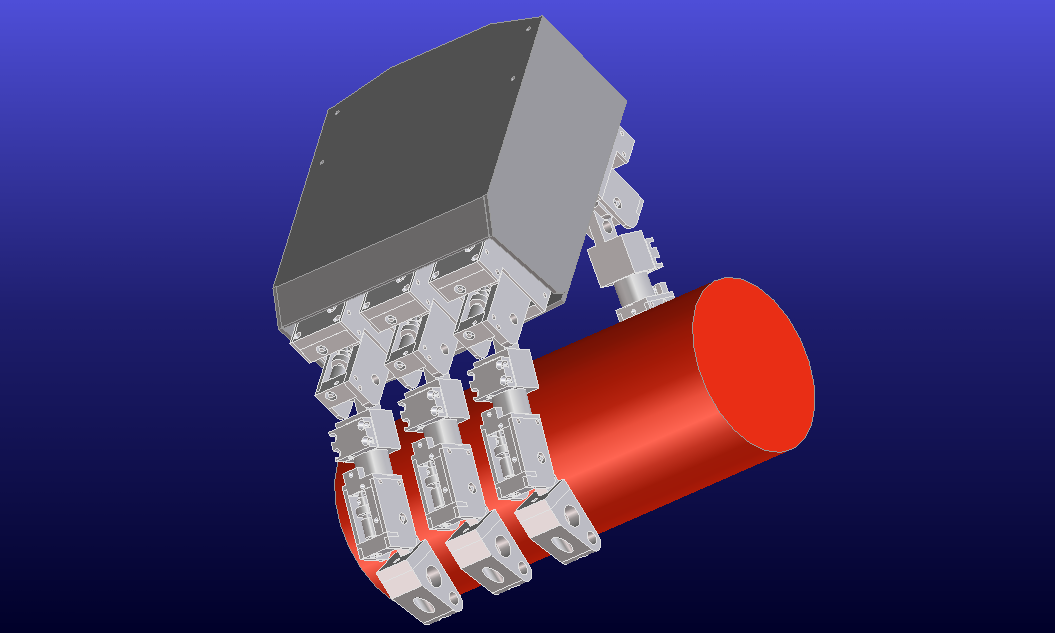
 動画hand.mpg hand2.mpg画像*準備中 |
|||
 |
 |
||||
 |
 |
 |
 |
 | |