受動2足歩行の研究近年、エンターテイメントをはじめとする二足歩行ロボットの抱える問題点として、稼動時間の短さが挙げられる。その原因は主にアクチュエータを使用することによるエネルギーの過剰消費によるものである。 受動二足歩行は、下り坂の降下などにおいて重力のみを用いて二足歩行を行うため、消費エネルギー削減に対しては大変有用である。 本研究では、受動二足歩行を行う歩行機械モデルの作成による試行実験と、近似モデルを使用したシミュレーション解析によって受動二足歩行の原理を解明し、その実現可能性と応用策を見出すことを目的とする。 現在のところは歩行研究の初期段階である左右方向の運動を無視した二次元的な歩行における受動歩行の研究を行っている。 製作モデルによる歩行実験実験機である歩行機械の外観をFig.1に示す。今回は受動二足歩行の原理・動作確認の意味合いが大きいため、実験機の設計は先立って研究が行われているアメリカのCornell大学の論文を参考にしている。 当実験機は二次元歩行のため横方向への転倒を防ぐ目的で、外側二本と内側二本がそれぞれ連動して稼動するしくみとなっており、擬似的に二足歩行の動作を行う。 膝間接には人間がとることの無い姿勢にならないよう、前方に曲がらないようにストッパーが設けてあり、実験においてはストッパーの延長箇所に、歩行安定化のための吸盤機構を設けている。 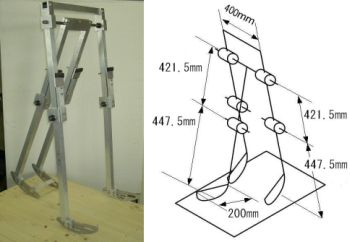 この実験機を用いて、傾斜角3[deg]の斜面により形成された歩行路(約2.5[m])上で歩行実験を行ったところ、この歩行路を歩き切ることを確認した。 近似モデルを使用した物理演算によるシミュレーション本研究ではLMS社の機構解析ソフトDADSを用い、Fig.2に示すような歩行機械のシミュレータを作成している。前述の実験機を基にし、当該歩行機械に必要となる機構要素群の定義と、床面との衝突や摩擦を考慮したモデル定義により現実に即したモデル設計を行っている。 
足の振り出し角度などの初期条件を試行錯誤的に決定しシミュレーション実験を繰り返すことで、長時間にわたり受動二足歩行が可能な最適パラメータ値を見出す。 実際に32歩までの歩行をシミュレーション上で確認した。 なお、このときの初期条件値は前述の実験機での実際の歩行実験にフィードバックされた。 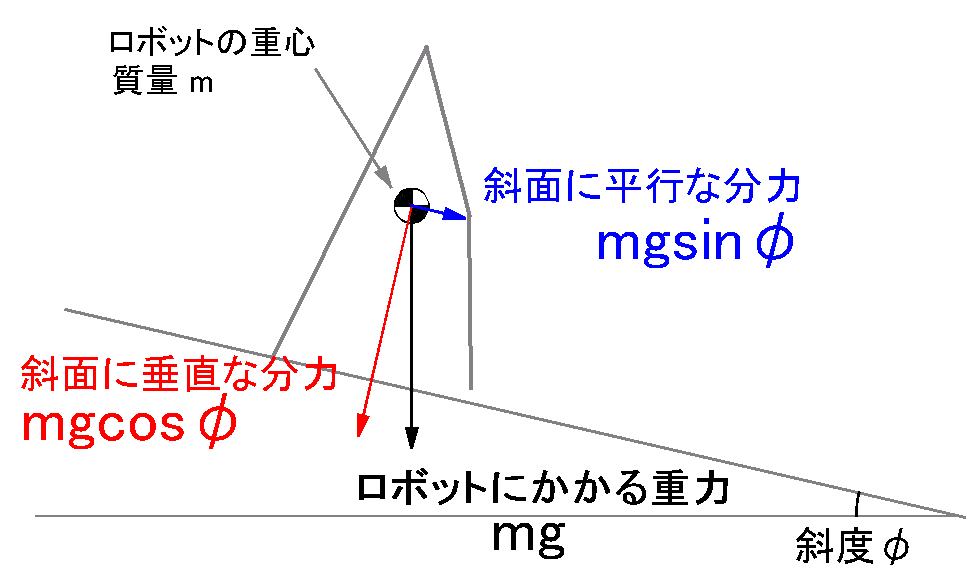
 動画bwr1.mpg bwr2.mpg bwr3.mpg bwr4.mpg画像*準備中 |
|||
 |
 |
||||
 |
 |
 |
 |
 | |