
テスターの製作を通し、半田付け,カラーコードの読み方等を、また、7つのテーマの工学実験を通し、
電気回路で学ぶ基本的な法則を確かめ、計測機器の取り扱い方,基本的なデータ処理の方法,
レポートの書き方を学ぶことを目的としています。

PIC(Peripheral Interface Controller)を用い、実際に各種センサやモーターを動作・制御することにより、
ハードウェアの仕組みからI/Oや割り込み処理に関連するソフトウェアの領域までを体験的に学習することを
目的にしています。後期は、実習工場における各種工作機械の使用方法と工作法に関する工作実習、
およびそれに並行してオシロスコープの取り扱い方を学ぶ実験を行います。
ソフト補正,シーケンス制御を体験的に学習すると共に,ファジー制御の基本を理解することを目的に、
ロボットを用いて実験を行っています。車輪型ロボットが駆動する際、左右のモータの立ち上がり時間、
駆動スピードをいかに調整して正しく直進・旋回駆動させるか、その経験をファジー推論に適用しています。

本科4年生が1年かけて製作するMIRSでは、USBカメラによる画像処理環境を標準で用意しているため、その
環境を利用するために、画像処理の基本とOpenCVを用いた数字認識の方法について学習することを目的にしています
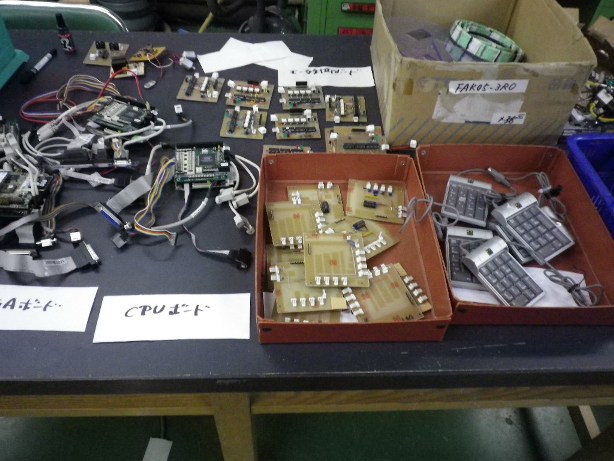
沼津高専電子制御工学科4年では1年間かけて小型自律移動ロボット(MIRS:Micro Intelligent Robot System)を製作します。 下の写真は製作に向け、昨年度のマシンを解体したところです。随時、進捗をのせていきます

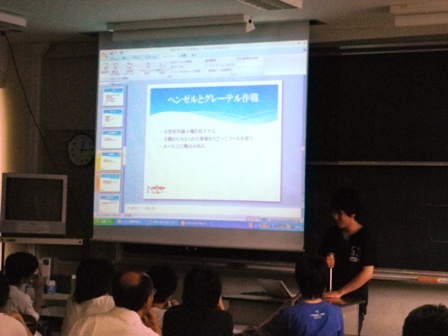
下の写真は自分たちが作成するマシンのコンセプトおよびシステムのレビューを行っている様子です。
ヘンゼルとグレーテル作戦(?)やとにかく正確に動くこと、など様々な提案が行われました。

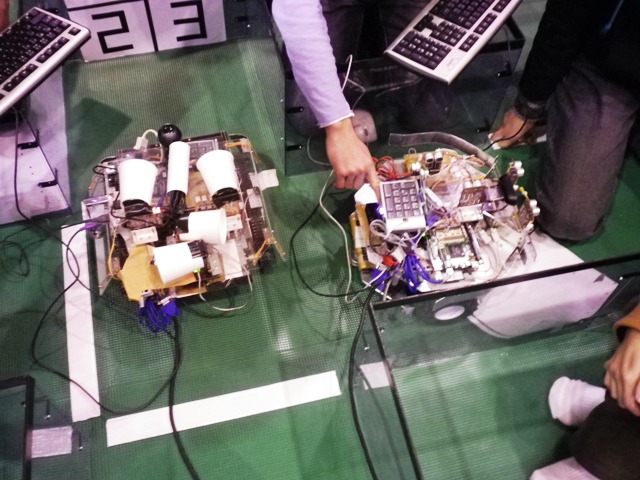
2011/1/24、プレ競技会が開催されました。どのチームも必死に調整しています。

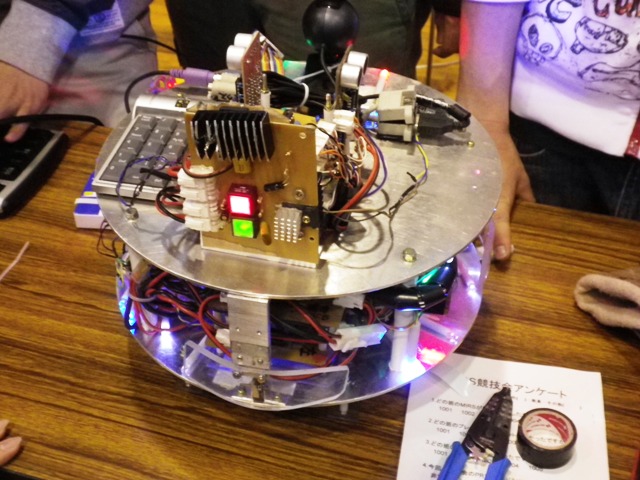
2011/2/4、MIRS競技会が開催されました。優勝はMIRS1001。









{kind=link}