電気回路で学ぶ基本的な法則を確かめ、計測機器の取り扱い方,基本的なデータ処理の方法,
レポートの書き方を学ぶことを目的としています。

PIC(Peripheral Interface Controller)を用い、実際に各種センサやモーターを動作・制御することにより、
ハードウェアの仕組みからI/Oや割り込み処理に関連するソフトウェアの領域までを体験的に学習することを
目的にしています。後期は、実習工場における各種工作機械の使用方法と工作法に関する工作実習、
およびそれに並行してオシロスコープの取り扱い方を学ぶ実験を行います。


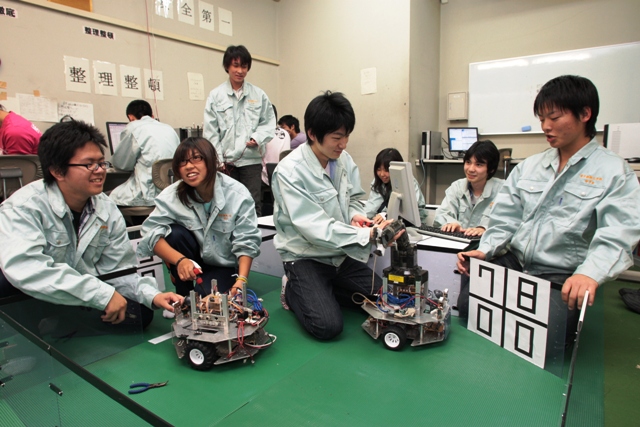
ソフト補正,シーケンス制御を体験的に学習すると共に,ファジー制御の基本を理解することを目的に、
ロボットを用いて実験を行っています。車輪型ロボットが駆動する際、左右のモータの立ち上がり時間、
駆動スピードをいかに調整して正しく直進・旋回駆動させるか、その経験をファジー推論に適用しています。

ロボット工学においてシミュレーションを行う際、モデルや数式が間違っているか否かを確認するには、実験による検証が最も確実で良い方法ですが、すべての場合において実機による検証ができるとは限りません。本実験では、ロボットシミュレーションにMATLAB/Simulinkを用い、ロボット工学で扱われる数式の理解を深めることを目的としています。
沼津高専電子制御工学科4年では1年間かけて小型自律移動ロボット(MIRS:Micro Intelligent Robot System)を製作します。
2012年1月30日にMIRS競技会が開催されました
当日公開されるコースに対して各チームが1年かけて製作したロボットで挑みます
優勝はMIRS1102、審査員特別賞はMIRS1104となりました