- ホーム
- 橋梁調査点検ロボットRoBInSの開発に関する研究
橋梁調査点検ロボットRoBInSの開発に関する研究
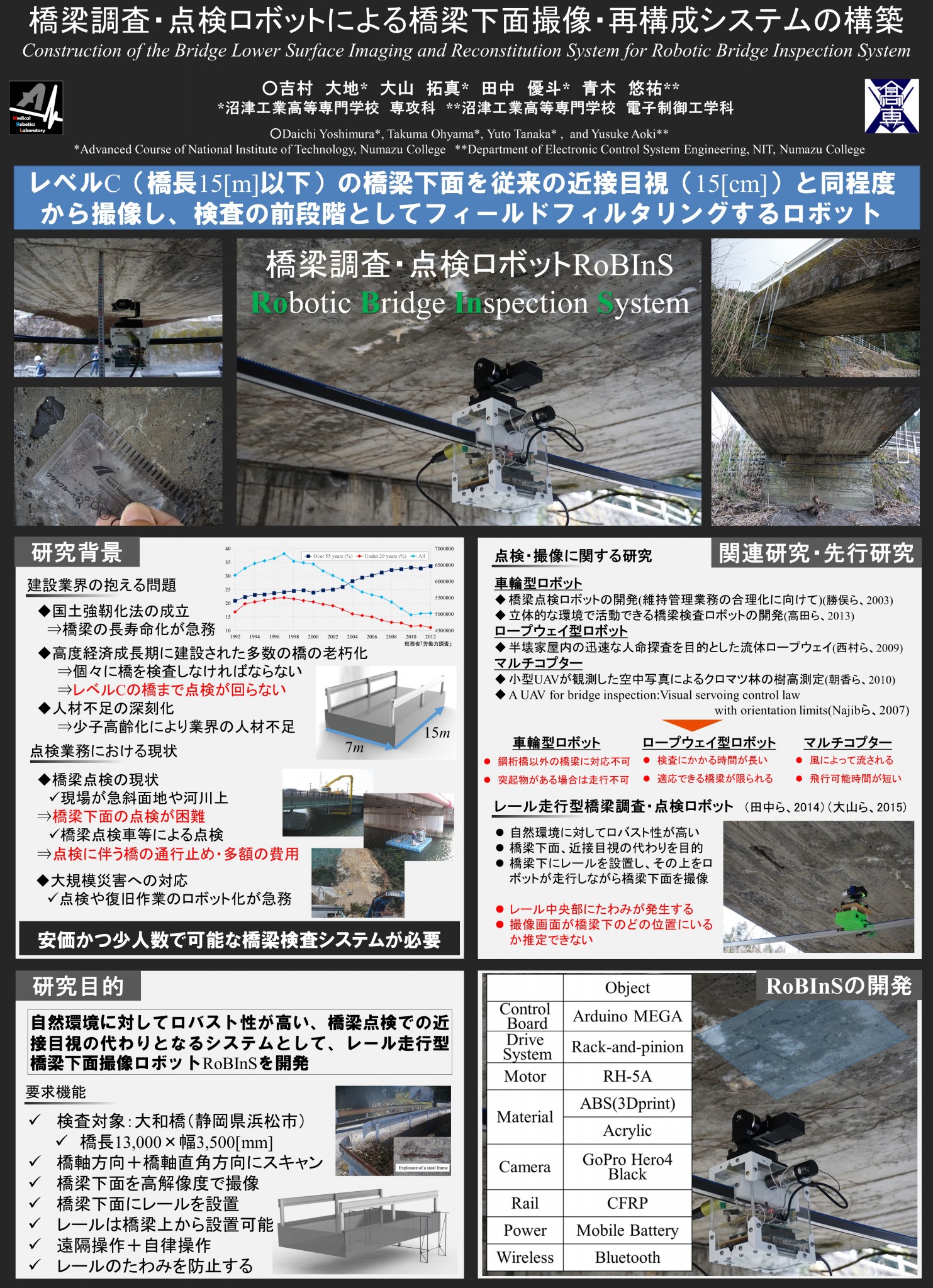
研究背景
現在,我が国の建設業就業者数は15年前に比べ27%,55歳以上は約34%,29歳以下は約11%の減少傾向にあり,建設業における人手不足および高齢化は,ますます深刻化してきている.そのため,建設技能者の労働環境の改善に加え,短時間かつ容易に施工できる建設機械や器具の開発は,この課題の解決に向けて大いに有効であるが,これまで顕著な成果が見えていなかった.そこで,新たな発想やアイデアに立ち返り,抜本的な課題解決が必要とされてきている.建設業界では,国土強靭化基本法の成立を受けインフラ整備に注目が注がれている中,橋の長寿命化が急務となっている.静岡県内だけでも約6000以上の橋があり,そのうち97%は補強が必要とされている.橋の寿命はおよそ50年といわれており,橋の老朽化は浜松市の弁天橋ワイヤ切断事故のような重大な事故につながる危険性があるため定期的に点検を行う必要がある.中でもFig.1のように橋長15m未満であるレベルCに分類される橋はどれも鉄筋露出,CO剥落などの老朽化が激しく,またこれらの橋はいずれも山間部にあり住民の生活に密接にかかわる橋であるため,橋の崩落は集落の孤立につながってしまう恐れがある.一方,橋の点検には近接目視や打音検査などがあり,人の手による検査が行われている.しかし「橋梁の調査・点検」に際して現場は急斜面地や河川上などの立地条件により,橋梁下面の調査・点検業務が非常に困難というのが現状である.現在そのような場合には,橋梁点検車や橋梁点検用浮足場などを用い点検作業を行っているが,これには多額の費用がかかるほか,橋を通行止めにしなければならないといった問題がある.そこで,本研究では様々な種類の橋梁検査に応用でき,かつ自然環境にあまり影響されない検査方法を提案するとともに,検査ロボットを新たに開発し,実際の橋梁にて検証実験を行っている.
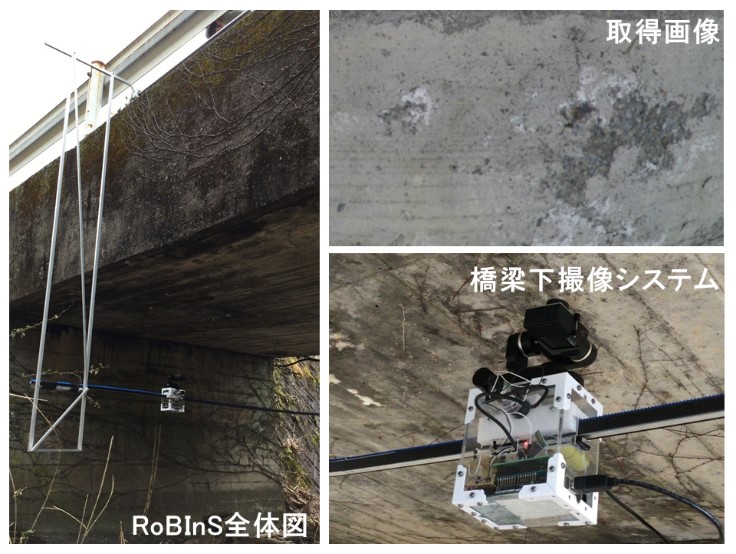
橋梁調査点検ロボットRoBInS
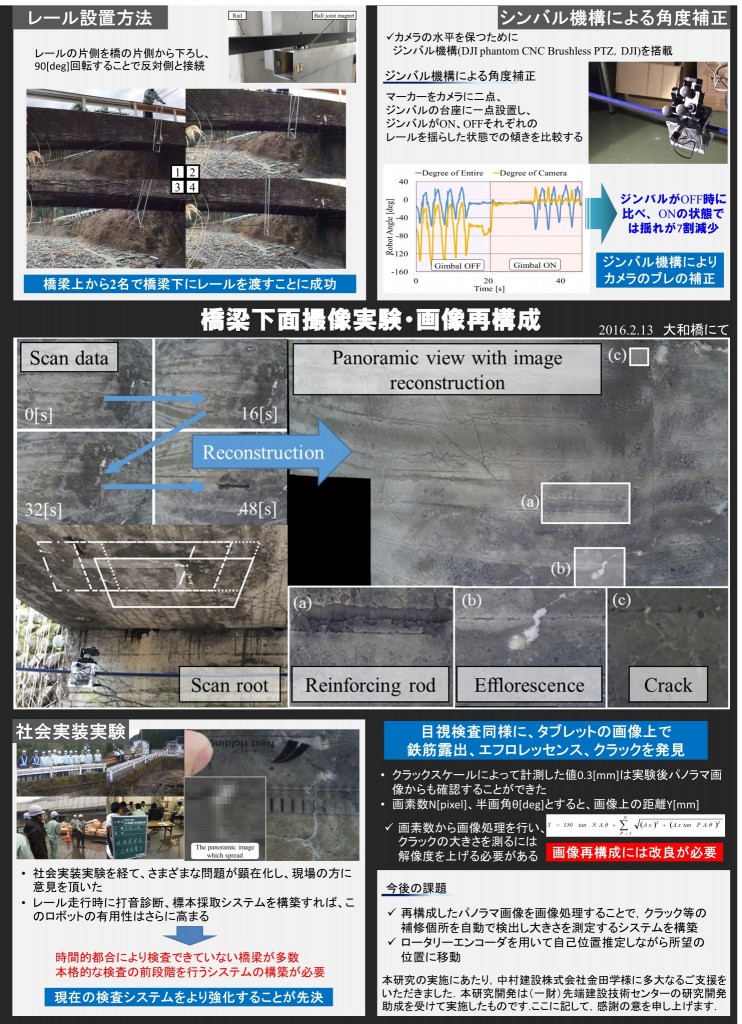
橋梁調査点検ロボットRoBInSロボットは小型カメラ(GoPro4SILVER,GoPro社製)を搭載し,常に橋梁下面を撮像するシステムとなっている.駆動方式はラック・アンド・ピニオン方式を採用し,ロボット内部にレールを通すことでロボットの落下防止を図っている.また撮像中のレールのねじれや風による影響を,ジンバル機構(FY-WG,FEIYUTECH社製)を搭載することにより軽減し,撮像画面の揺れを抑えている.そして,橋軸方向の移動を可能とするため,ボールねじを使用し,RoBInS全体を橋軸方向に移動することを可能にした.これにより一度に撮像できる範囲が拡大し,橋長方向に5[m],橋軸方向に1[m]の範囲を,機材の移動をせずに連続的に撮像することを可能にした.
日本機械学会ロボティクス・メカトロニクス講演会2016 発表ポスター
 新聞・メディア発表
新聞・メディア発表
- 「橋の点検 ロボにお任せ」、静岡新聞(夕刊)に記事掲載、2016年7月12日
- 「シリーズ最先端を行く 沼津高専の研究から 10」、沼津朝日新聞に記事掲載、2016年3月1日
受賞
- KOSEN発“イノベーティブ・ジャパン”プロジェクト 社会実装コンテスト 社会実装賞(要素技術ハードウェア)、社会インフラ用ロボット賞
大山拓真、吉村大地、田中優斗、青木悠祐:「容易に設置・検査可能な橋梁調査点検ロボットの開発」、KOSEN発”イノベーティブ・ジャパン”プロジェクト社会実装コンテスト、2016年
- 富士山麓アカデミック&サイエンスフェア2015 制御・情報分野最優秀賞
大山拓真、遠藤祐太朗、鈴木克真、青木悠祐:「橋梁調査・点検ロボットによる橋梁下撮像システムの構築」、富士山麓アカデミック&サイエンスフェア2015予稿集、2015、p.8、沼津
- KOSEN発“イノベーティブ・ジャパン”プロジェクト 社会実装コンテスト 要素技術賞(ハードウェア)、社会実験賞、社会インフラ用ロボット賞
遠藤祐太朗、佐野徳美、鈴木克真、田中優斗、瀬戸翔太、渡邊智朗、赤池郁也、石井建至、吉村大地、青木悠祐:「橋梁調査・点検ロボットの開発」、KOSEN発”イノベーティブ・ジャパン”プロジェクト社会実装コンテスト、2015年
助成金
- 一般財団法人先端建設技術センター、平成26年度研究開発助成、「容易に設置・検査可能な橋梁調査点検ロボットの開発」、研究代表者、2015-2016